PRIFIT: Learning to Fit Primitives Improves Few Shot Point Cloud Segmentation
Published at Symposium on Geometry Processing 2022.
Gopal Sharma, Bidya Dash, Aruni RoyChowdhury, Matheus Gadelha, Marios Loizou, Liangliang Cao, Rui Wang, Erik G. Learned-Miller, Subhransu Maji, Evangelos Kalogerakis
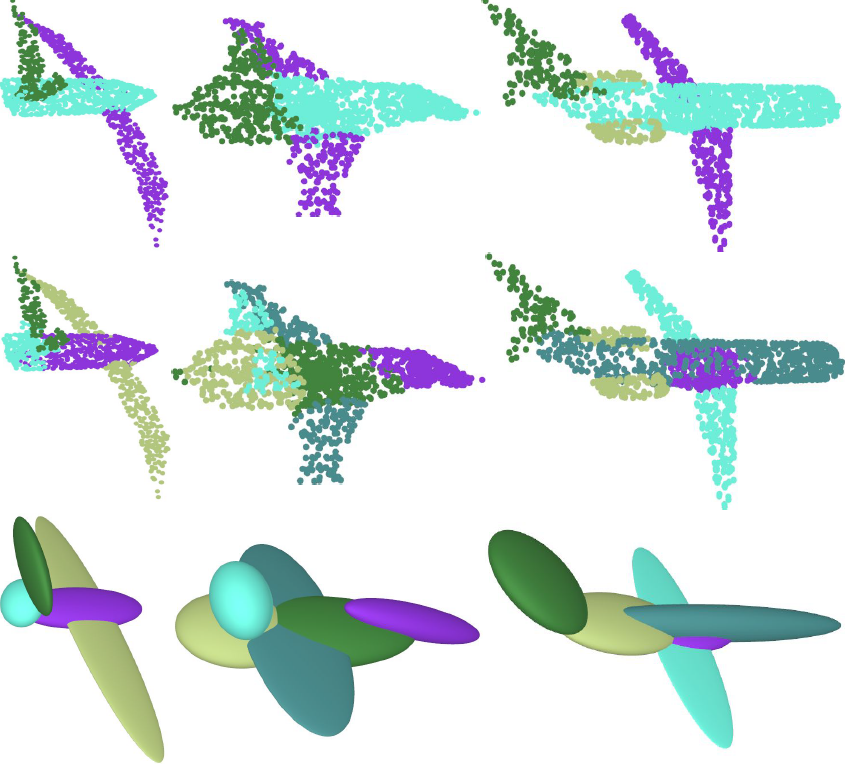
TL;DR PrimFit uses primitive fitting within a semisupervised learning framework to learn 3D shape representations. Top row: 3D shapes represented as point clouds, where the color indicates the parts such as wings and engines. The induced partitions and shape reconstruction obtained by fitting ellipsoids to each shape using our approach are shown in the middle row and bottom row respectively. The induced partitions often have a significant overlap with semantic parts.
Abstract
We present PrimFit, a semi-supervised approach for label-efficient learning of 3D point cloud segmentation networks. PrimFit combines geometric primitive fitting with point-based representation learning. Its key idea is to learn point representations whose clustering reveals shape regions that can be approximated well by basic geometric primitives, such as cuboids and ellipsoids. The learned point representations can then be re-used in existing network architectures for 3D point cloud segmentation, and improves their performance in the few-shot setting. According to our experiments on the widely used ShapeNet and PartNet benchmarks. PrimFit outperforms several state-of-the-art methods in this setting, suggesting that decomposability into primitives is a useful prior for learning representations predictive of semantic parts. We present a number of ablative experiments varying the choice of geometric primitives and downstream tasks to demonstrate the effectiveness of the method.
Please find the full paper here.
Environment setup
CUDA setup:
CUDA: '9.2.148' # torch.version.cuda
CuDNN: 7603 # torch.backends.cudnn.version()
Conda environment:
conda create -n acd-env python=3.6
pip install numpy six protobuf>=3.2.0
pip install torch torchvision
pip install matplotlib tqdm tensorboard_logger trimesh
For reference, we also tested using CUDA 10.1, and the corresponding torch and torchvision can be installed using pip install torch==1.6.0+cu101 torchvision==0.7.0+cu101 -f https://download.pytorch.org/whl/torch_stable.html.
Data setup
-
Download part segmentation dataset ShapeNet here and save in
data/shapenetcore_partanno_segmentation_benchmark_v0_normal/. -
Download the pre-computed ACD components for the unlabeled ShapeNet core shapes from here and extract its content in
data.
Thanks to yanx27 for an excellent PyTorch PointNet++ implementation Pointnet_Pointnet2_pytorch; our model implementation is based off that codebase.
Few-shot segmentation on ShapeNet
From the project root, the following code snippet trained a model jointly on semantic segmentation on ShapeNetSeg, using 10 samples per shape category (i.e. 10 * 16 = 160 labeled training samples) and a pairwise contrastive loss over ACD components of the unlabeled ShapeNet Core data (for 20 epochs, decaying the learning rate at every epoch, with a batchsize of 24 shapes).
python train_partseg_shapenet_multigpu.py --seed 786 --alpha 0.01 --split val --k_shot 10 \
--batch_size 24 --step_size 1 --selfsup --epoch 20 \
--learning_rate 0.01 --lmbda 1 --quantile 0.05 --msc_iterations 10 --max_num_clusters 25 \
--ss_path $path
The models are stored in the experiment output folder, under checkpoints sub-folder. Tensorboard logs and console output as txt file are saved under sub-folder logs. The test performance is evaluated at the end of the training epochs (i.e. epoch 9 in this case) and written to the logfile. The directory ss_path ($path) refers to the directory where pre-computed ACD components for the unlabeled ShapeNet core shapes is downloaded to (2)!
Citation
You can cite the paper as:
@misc{prifit2022,
title={PRIFIT: Learning to Fit Primitives Improves Few Shot Point Cloud Segmentation},
author={G. Sharma and B. Dash and A. RoyChowdhury and M. Gadelha and M. Loizou and L. Cao and R. Wang and E. G. Learned-Miller and S. Maji and E. Kalogerakis},
year={2022},
eprint={2112.13942},
archivePrefix={arXiv},
primaryClass={cs.SGP}
}